


The extra heft in bats’ wings would seem like a liability when it comes to flying. But a new study shows it’s their heavy wings that help them land feet up.
“Bats land in a unique way,” says Sharon Swartz, a biologist at Brown University. “They have to go from flying with their heads forward to executing an acrobatic maneuver that puts them head down and feet up. No other flying animal lands the same way as bats do.”
But exactly how they are able to generate the forces necessary to perform those maneuvers have not, until now, been clear.
“When they come in to land, they’re not moving very fast, which makes it hard to generate the aerodynamic forces needed to reorient themselves,” says Kenny Breuer from the School of Engineering. “So the question is, how do bats get themselves in position to land?”
Researchers used a special flight enclosure, high-speed cameras, and some sophisticated computer modeling to discover it has a lot to do with wing mass and inertia.
Bats’ wings are heavy, hand-like assemblages of bone, muscles, joints, tendons, and skin. By throwing that extra wing weight around in very precise ways, bats generate inertial forces in order to reorient themselves, rather than relying on the aerodynamic forces generated by pushing against the air.
It’s similar to the way high divers shift their weight to perform flips and twists, or the way cats reorient themselves to land feet-down when they fall, Breuer says.
For the study, published in the journal PLOS Biology, researchers trained bats from two different species to fly into an enclosure and land on a small piece of mesh fixed to the ceiling. High-speed cameras were able to catch a subtle wing maneuver that the bats make in the fraction of a second before they land.
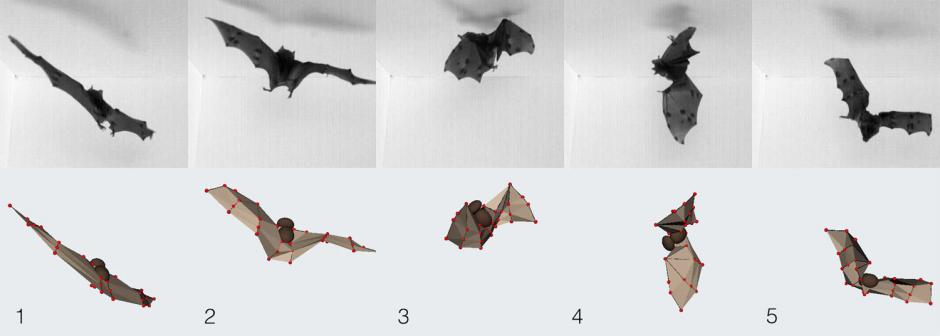
The videos showed that as the bats approach the ceiling, they retract one of their wings ever so slightly toward their bodies, while flapping the other at full extension. With each wing beat in that asymmetric configuration, the bats rotate a half turn, helping to put them in position to meet the mesh feet first. In subsequent trials, the researchers removed the mesh from the ceiling, leaving the bats nothing to grab on to. Video of those trials showed that, after attempting to land, the bats performed a similar rolling maneuver using their wings in order to reorient themselves for forward flight.
The researchers then used computer simulations to confirm that the effect they were seeing was due to inertia rather than aerodynamics. They used motion capture to record the bats’ movements and then replayed those movements through a computer simulation in which the effects of different forces could be switched on and off. When the simulation was run with aerodynamic forces turned off, the virtual bats were still able to recreate the motion of the real ones.
Similarly, the models allowed manipulation of wing mass parameters. The researchers ran the simulation again with the bats’ wing mass reduced to the proportions of a fruit fly, which have very light wings for their body mass. That simulation showed that the landing rotation was not possible in the absence of aerodynamic forces.
“What this tells us is that in bats, with their heavy wings, it’s the inertial forces that are more important relative to aerodynamics,” Breuer says. “That’s a bit of a counterintuitive conclusion. Normally you’d think that an animal would not want to have such massive wings. But here, it turns out that the mass can be used to some benefit.”
The research sheds light on the basic biology that helps bats fly and land the way they do, but also may be useful in the development of human-made flying machines.
“From an engineering perspective, there’s a lot of interest in drones and flying microvehicles,” Breuer says. “Maneuvering or directing those robotic vehicles is a challenge. The idea here is that using redistribution of mass is not a bad approach to take.”
The Air Force Office of Scientific Research MURI program on bio-inspired flight and the National Science Foundation supported the work.
Source: Brown University or Futurity.org


